基础概念
半监督学习介于监督学习与无监督学习之间。一般而言,半监督学习的任务与监督学习一致,任务中包含有明确的目标,如分类。而所采用的数据既包括有标签的数据,也包括无标签的数据。
前置知识
香农熵
\(H(X)=\sum_{x} P(x) \log _{2}[P(x)]\) 变量的不确定性越大,熵就越大,把变量弄清楚所需要的信息量也就越大。
熵正则化
熵正则化:就是在似然函数的基础上,再加上香农熵,值得注意的是,似然 函数的范围是 已经标记的数据,香农熵的范围是未标记的数据。 \(C = \sum_{i=1}^{l} \ln P\left(y_{i} \mid x_{i} ; \theta\right) + \lambda \sum_{x} P(x) \log _{2}[P(x)]\)
类间的低密度分离
低密度分离的假设就是假设数据非黑即白,在两个类别的数据之间存在较为明显的鸿沟,即在两个类别之间的边界数据的密度很低(数据质量很好)
Self-training
首先基于有标签的数据训练一个模型,然后将没有标签的数据输入进去进行预测,得到没有标签数据的一个标签,之后将一部分的带有伪标签的数据转移到有标签的数据中,再进行训练,循环往复。如何选取加入有标签数据的伪标签数据需要自己定义。
平滑性假设
数据的分布是不均匀的,有的地方比较稀疏,有的地方比较密集。 如果在高密度的地方比较相近,则两个数据具有相同的标签 精神:近朱者赤、近墨者黑
Denosing Auto-Encoder
以一定的概率分布去擦除原始的input矩阵(这样看起来是丢失了部分数据)。以这丢失的数据去计算y,计算z,并将z和原始x做误差迭代,这样网络就学习了这个破损的数据。这样的破损数据有用。
1
2
1.通过与非破损数据训练的对比,破损数据训练出来的weight噪声比较小,降噪因此的名
2.破损数据一定程度上减轻了训练数据与测试数据之间的代沟,由于数据的部分被丢弃了,因而破损数据一定程度上比较接近测试数。
最小熵
“知识”有一个固有信息熵,代表它的本质信息量。但在我们彻底理解它之前,总会有未知的因素,这使得我们在表达它的时候带有冗余,所以按照我们当前的理解去估算信息熵,得到的事实上是固有信息熵的上界,而信息熵最小化意味着我们要想办法降低这个上界,也就意味着减少了未知,逼近固有信息熵。
MixUp
假设有两个样本$\left(x_{i}, y_{i}\right),\left(x_{j}, y_{j}\right)$,做如下处理: \(\begin{array}{l} \tilde{x}=\lambda x_{i}+(1-\lambda) x_{j} \\ \tilde{y}=\lambda y_{i}+(1-\lambda) y_{j} \end{array}\) 将$(\tilde{x}, \tilde{y})$作为增强数据或者虚拟训练数据,可以提高模型的鲁棒性和泛化能力。
主流方法
Pseudo-Label
主要的思想
1
2
1.运用训练出的模型给予无标签的数据一个伪标签
2.运用熵正则化思想,将无监督数据转化为目标函数的正则项。
总体的损失函数为: \(L=\frac{1}{n} \sum_{m=1}^{n} \sum_{i=1}^{C} L\left(y_{i}^{m}, f_{i}^{m}\right)+\alpha(t) \frac{1}{n^{\prime}} \sum_{m=1}^{n^{\prime}} \sum_{i=1}^{C} L\left(y_{i}^{m}, f_{i}^{\prime m}\right)\) n表示SGD中有标签数据的mini-batch大小 $n’$表示SGD中无标签数据的mini-batch大小 $f_i^m$表示有标签数据中m个样本的输出集合 $y_i^m$表示有标签数据中m个样本的真实标签 $f_i^{\prime m}$是无标签数据中m个样本的输出集合 $y_i^{\prime m}$是无标签数据中m个样本的伪标签 $\alpha (t)$是平衡他们的系数
不足:
1
2
Pseudo-Label 方法只在训练时间这个维度上,采用了退火思想,即采用时变系数α(t)。而在伪标签这个维度,对于模型给予的预测标签一视同仁,这就会引入错误信号。
假如模型对某一个样本所 预测的几个类别具有类似的低概率,每个都是0.1左右,那再以最大概率对应的的类别为伪标签,就不太合适。
Γ Model
主要思想:
1
2
作者认为,监督学习与无监督学习存在一定程度的冲突,无监督学习希望尽可能的保留原始信息,监督学习希望保留与监督任务相关的信息,对于其他与任务无关的特征并不关心。
半监督学习应该兼顾这两点。
Ladder Network结构:
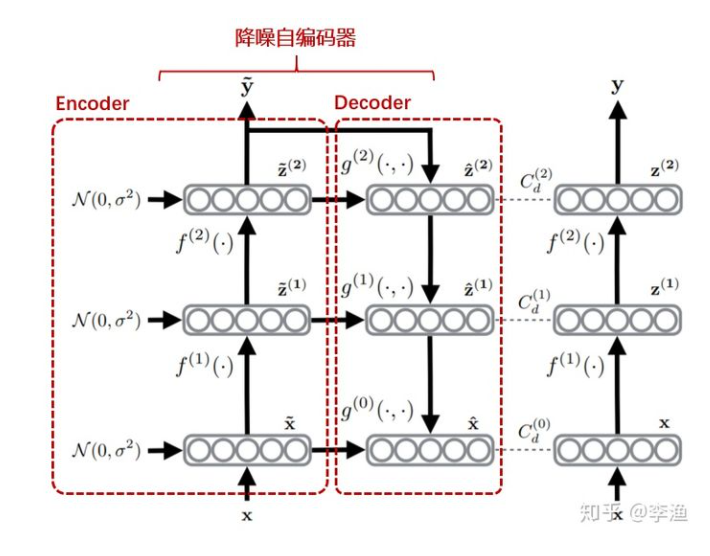
如上图,网络由两部分组成,分别是降噪自编码器以及无噪的前向网络(一般与降噪自编码器的编码端相同)。 对于有标签数据,数据只会流经降噪自编码器的 Encoder 模块,并通过顶层的输出与原始输入构建有监督的目标函数。 对于无标签数据,数据经过编码模块实现加噪编码,随后经过解码模块进行逐层解码,并获取一系列隐层表示,分别是$\tilde{z}^{(1)}, \quad \tilde{z}^{(2)}$等。另一方面,最右侧的无噪前向网络也会对原始无标签数据进行逐层解码得到$z^{(1)}, z^{(2)}$,这正是解码端对应隐层的目标值,通过极小化均方差误差,既可以从无标签数据中提取到学习信号。
整体的目标函数为: \(\begin{aligned} C &=C_{\mathrm{c}}+C_{\mathrm{d}} \\ &=-\frac{1}{N} \sum_{n=1}^{N} \log P(\tilde{\mathbf{y}}=t(n) \mid \mathbf{x}(n))+\sum_{l=0}^{L} \frac{\lambda_{l}}{N m_{l}} \sum_{n=1}^{N}\left\|\mathbf{z}^{(l)}(n)-\hat{\mathbf{z}}_{\mathrm{PA}}^{(l)}(n)\right\|^{2} \end{aligned}\) 第一项为有标签loss,第二项为无标签loss
Π Model & Temporal ensembling Model
Π Model
核心在于利用一致性正则从无标签的数据中提取有效信号。一致性正则表达了一种先验,即网络再输入数据的附近空间应该是平坦的,即使输入数据发生微弱变化,模型的输出也能够基本保持不变。
 \(\operatorname{loss} \leftarrow-\frac{1}{|B|} \sum_{i \in(B \cap L)} \log z_{i}\left[y_{i}\right]+w(t) \frac{1}{C|B|} \sum_{i \in B}\left\|z_{i}-\tilde{z}_{i}\right\|^{2}\)
注意公式中的L为有标签数据、B为minbatch,C为类别数目
\(\operatorname{loss} \leftarrow-\frac{1}{|B|} \sum_{i \in(B \cap L)} \log z_{i}\left[y_{i}\right]+w(t) \frac{1}{C|B|} \sum_{i \in B}\left\|z_{i}-\tilde{z}_{i}\right\|^{2}\)
注意公式中的L为有标签数据、B为minbatch,C为类别数目
1
2
1. 对每一个训练样本,在训练阶段进行两次前向计算,一次是随机增强变化,一次是模型的前向运算。由于增强是随机的,同时模型采用dropout,这两个因素都会造成两次前向运算结果的不同。
2. 损失函数由两部分构成,一种是交叉熵 ,一种是两次前向运算的均方误差。
Temporal ensembling Model
相较于Π Model,不同点在于目标函数的无监督loss项,Π Model计算的是两次前向结果的均方差,Temporal ensembling采用的是当前模型预测结果与历史预测结果的平均值做均方差计算。
这样做的好处:
1
2
用空间换时间,在相同的epoch下,总的前向计算次数少了一半,训练速度加快
通过历史预测做平均,有利于平滑单次预测中的噪声
VAT
VAT与Temporal ensembling Model 思想基本一致,都是想表示,模型所描述的系统是光滑的,因此当输入数据发生微小变化的i时候,模型的输出变化应该也是微小的,进而预测的标签是近似不变的。
VAT使用的噪声是模型变化最陡峭方向上的噪声,也就是所谓的对抗噪声,作者认为,如果模型在对抗噪声下,依然能够保持平滑,那么整个网络就能够表现出很好的一致性。
损失函数: \(\begin{array}{r} L_{\mathrm{adv}}\left(x_{l}, y_{l}, \theta\right):=D\left[h\left(y_{l}\right), p\left(y \mid x_{l}+r_{\mathrm{adv}}, \theta\right)\right] \\ \text { where } r_{\mathrm{adv}}:=\underset{r ;\|r\| \leq \epsilon}{\arg \max } D\left[h\left(y_{l}\right), p\left(y \mid x_{l}+r, \theta\right)\right] \end{array}\) 其中$r_{adv}$表示对输入数据所施加的对抗噪声,D表示模型对施加噪声前后两个输入对应输出的度量,这里采用的是KL三散度。 \(D[p(y \mid x), p(y \mid x+r)]:=\sum_{y \in Q} p(y \mid x) \log \frac{p(y \mid x)}{p(y \mid x+r)}\) 最后在损失函数中还加入了第三项,entropy minimization 项。即要求模型无论对于有标签数据还是无标签数据,都要求其熵尽可能小。 \(\mathcal{R}_{\text {cent }}=H(Y \mid X)=-\frac{1}{N_{l}+N_{u l}} \sum_{x \in \mathcal{D}_{l}, \mathcal{D}_{u l}} \sum_{y} p(y \mid x, \theta) \log p(y \mid x, \theta)\) 这和Pseudo-Label 模型中的第二项一样。
Mean Teacher
Mean Teacher由Temporal ensembling Model 发展而来,主要解决了其中两个问题(无标签数据的信息只能在下一次 epoch 时才能更新到模型):
1
2
1. 大数据集下,模型更新缓慢
2. 无法实现模型在线训练
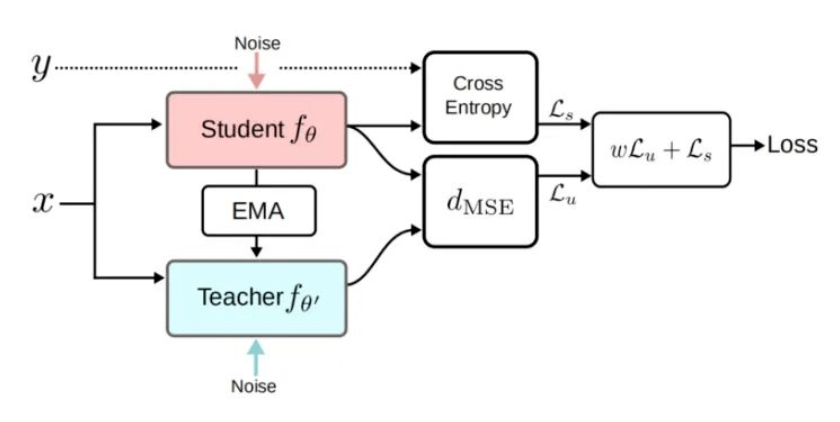
核心思想:
1
模型既充当学生,又充当老师。作为老师,用来产生学生学习时的目标;作为学生,则利用教师模型产生的目标来进行学习。而教师模型的参数是由历史上(前几个step)几个学生模型的参数经过加权平均得到
损失函数:
\(\mathcal{L}=w \frac{1}{\left|\mathcal{D}_{u}\right|} \sum_{x \in \mathcal{D}_{u}} d_{\operatorname{MSE}}\left(f_{\theta}(x), f_{\theta^{\prime}}(x)\right)+\frac{1}{\left|\mathcal{D}_{l}\right|} \sum_{x, y \in \mathcal{D}_{l}} \mathrm{H}\left(y, f_{\theta}(x)\right)\)
其中$\theta$ 的更新为:
\(\theta_{t}^{\prime}=\alpha \theta_{t-1}^{\prime}+(1-\alpha) \theta_{t}\)
由此可知,Mean teacher相对比于 temporal ensembling的优势在于:
1
2
1. 在temporal ensembling中,无标签数据的目标标签来自模型前几个epoch预测结果的加权平均。而在Mean Teacher中,无标签数据的目标标签来自teacher模型的预测结果。
2. 由于是通过模型参数的平均来实现标签预测,因此在每个step都可以把无标签中的信息更新到模型中,而不必像temporal ensembling模型需要等到一个epoch结束再更新。这一特点使得这一算法可以用在大数据集以及在线模型上。
MixMatch
融合上述几个方法的精华,一致性正则、伪标签、熵正则化以及Mixup技术。 思想核心:
1
2
1. 伪标签生成,想比较与早期的Pseudo-Label 模型,做了改进。一个是运用数据增强技术对无标签数据进行k次变换,模型分别对k次变换进行预测,然后取k次结果的平均作为伪标签的期望结果。二,在一的基础上,运用熵正则化思想,对于k次平均后的结果,再进行锐化操作,使得各个类别熵的概率值差别更为明显。
2. 数据的MixUp:mixup按照一定比例将有标签的数据进行混合以构成新的样本。Mixup变化本身视为一种正则化技术。直观来看,它要求,当模型的输入为另外两个输入的线性组合时,其输出也是这两个数据单独输入模型后,所得输出的线性组合。
目标函数: \(\begin{aligned} \mathcal{L} &=\mathcal{L}_{\mathcal{X}}+\lambda_{\mathcal{U}} \mathcal{L}_{\mathcal{U}} \\ &=\frac{1}{\left|\mathcal{X}^{\prime}\right|} \sum_{x, p \in \mathcal{X}^{\prime}} \mathrm{H}(p, \text { pmodel }(y \mid x ; \theta))+\lambda_{\mathcal{U}} \frac{1}{L\left|\mathcal{U}^{\prime}\right|} \sum_{u, q \in \mathcal{U}^{\prime}}\left\|q-\mathrm{p}_{\text {model }}(y \mid u ; \theta)\right\|_{2}^{2} \end{aligned}\) 第一项为交叉熵,用于计算有标签数据的误差,第二项为MSE,用于计算无标签数据与伪标签之间的均方误差。
ReMixMatch
相比较于MixMatch做了如下改进:
1
2
1. Distribution Alignment由于MixMatch的标签猜测有可能存在噪声和不一致的情况,作者提出利用有标签数据的标签分布,对无标签猜测进行对齐。
2. Augmentation Anchor:作者的假设是对样本进行简单增强(比如翻转和裁切)之后的预测结果,要比多次复杂变换更加可靠和稳定。因此,对于同一张图片,首先进行弱增强,得到预测结果,然后对同一张图片进行复杂的强增强。弱增强和强增强共同使用一个标签猜测进行Mixup和模型训练。
\(\tilde{q}=\operatorname{Normalize}\left(q \times \frac{p(y)}{\tilde{p}(y)}\right)\) 其中$p(y)$为有标签数据的标签分布,$\tilde{q}$是一个运行平均版本的无标签猜测,q是对当前标签数据的标签猜测。
UDA
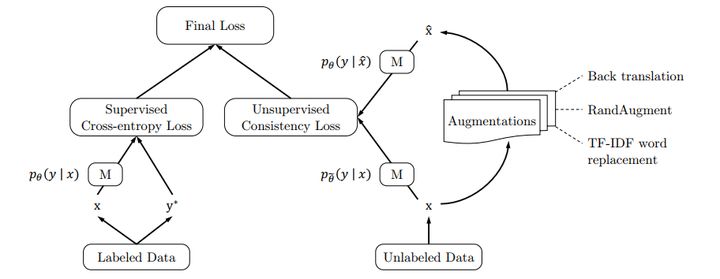
从下图的结构上看UDA和 Π Model 基本一致,区别在于无监督loss中一个用的是KL散度一个用的是MSE。
其先进的原因:
1
2
3
1. 采用了先进的数据增强技术,cv领域的RandAugment,NLP领域的Back Translation和非核心词替换。
2. 采用了最新的迁移模型。
3. 采用了一系列精心设计的训练技巧,平衡有监督和无监督的TSA,基于熵正则化锐化技术,无标签数据的二次筛选等。
FixMatch
做了两个简化:
1
2
1. temperature sharpening 换成 pseudo label
2. 通过设定一个阈值,在计算 unlabeled loss 时,对 prediction 的 confidence 超过阈值的 unlabeled instance 才算入 unlabeled loss,这样使得 unlabeled loss 的权重可以固定
损失函数由两部分构成: \(\ell_{s}=\frac{1}{B} \sum_{b=1}^{B} \mathrm{H}\left(p_{b}, p_{\mathrm{m}}\left(y \mid \alpha\left(x_{b}\right)\right)\right) \\ \ell_{u}=\frac{1}{\mu B} \sum_{b=1}^{\mu B} \mathbb{1}\left(\max \left(q_{b}\right) \geq \tau\right) \mathrm{H}\left(\hat{q}_{b}, p_{\mathrm{m}}\left(y \mid \mathcal{A}\left(u_{b}\right)\right)\right)\)
最后的损失函数为$l_s + \lambda _u l_u$,其中$\lambda _u$是一个超参数,表示未标记损失的相对权重。
mixtext

第一步:对未标记数据进行增强,采用未标注数据$X^u$回译进行K次增强生成$X^a$ 第二步:对未标记数据进行标签预测,将原始未标注数据$X^u$和增强后的未标注数据$X^a$一同喂入当前模型中,通过平均加权的方式对未标注数据进行预测。 \(\left.\mathbf{y}_{i}^{u}=\frac{1}{w_{\text {ori }}+\sum_{k} w_{k}}\left(w_{\text {ori }} p\left(\mathbf{x}_{i}^{u}\right)+\sum_{k=1}^{K} w_{k} p\left(\mathbf{x}_{i, k}^{a}\right)\right)\right)\) 由于预测出来的伪标签分布相对平坦,采用Sharpen方式进行锐化 \(\text { Sharpen }(p, T)_{i}:=p_{i}^{\frac{1}{T}} / \sum_{j=1}^{L} p_{j}^{\frac{1}{T}}\) 第三步:对标注数据和未标注数据做TMix,混合在一起生成X然后随机选择两个样本进行TMix,然后通过KL散度计算损失。 \(L_{TMix} = E_{x,x^{\prime} \in X} KL(mix(y, y^{\prime})||p(TMix(x, x^{\prime})))\) 当x的来源不同的时候,上述损失意义不同:
1
2
当x来自目标数据为标注数据时,主要利用来自有标注数据,因此模型损失为有监督损失
当x为无标注数据,主要利用信息来自未标注数据,因此模型损失为一致性训练损失
尴尬的不用标注数据
Text Classification Using Label Names Only: A Language Model Self-Training Approach