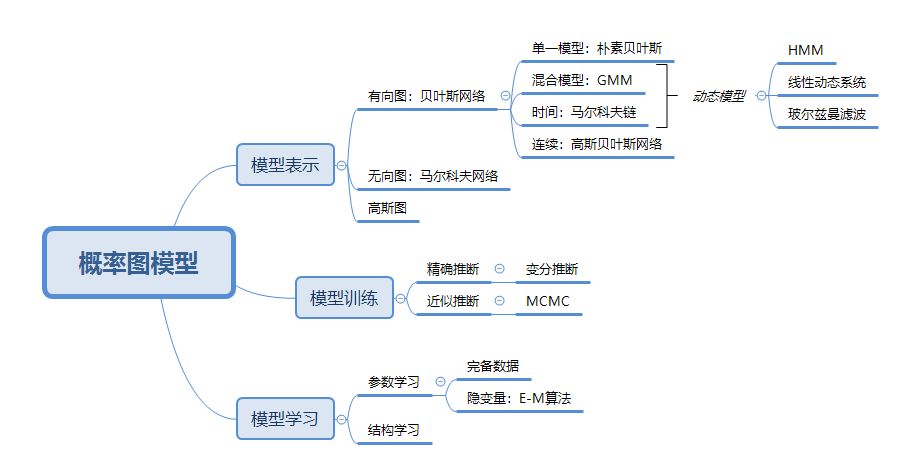
基本概念

- 概率图模型用图的形式表现出上图中的各种假设。节点表示随机变量,边表示条件概率
- 概率图模型有以下三大问题:
- 在图中引入概率模型,图的概念和数据结构中的图概念一样
- 同时概率图模型一般处理的是高维随机变量,其中主要关心的是边缘概率\(P(x_i)\)和条件概率\(P(x_j,given,x_i)\)
- 一些规则: \(加法:P(x_1) = \int P(x_1,x_2)dx_2\\ 乘法:P(x_1,x_2) = P(x_1)P(x_2|x_1)=P(x_2)P(x_1|x_2)\\ 链式:P(x_1,x_2,...,x_p)=P(x_1)\prod_{i=2}^n P(x_i|x_{i-1}-x_{n-1})\\ 贝叶斯:P(x_1|x_2)=\frac{P(x_2|x_1)P(x_1)}{P(x_2)}\)
- 通过概率图模型可以方便的刻画随机变量间不同的条件独立关系。
贝叶斯网络
- 在联合概率分布和随机变量之间的关系,可以通过拓扑排序获得有向图,而通过有向图可以很快的得到联合概率的因子分解。 \(P(x_1,x_2,...,x_p) = \prod_{i=1}^p P(x_i|x_{parent(i)})\)
- 下图为三种典型的结构:
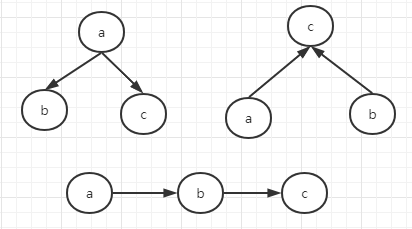
- 三种结构的联合概率分布可以写作 \(第一种:P(a,b,c) = P(a)P(b|a)P(c|a)=p(a)P(b|a)P(c|a,b)->给定a,b与c相互独立\\ 第二种:P(a,b,c) = p(a)P(b)P(c|a,b)=p(a)P(b|a)P(c|a,b)->a,b相互独立,给定c则不独立\\ 第三种:P(a,b,c) = P(a)P(b|a)P(c|b)=p(a)P(b|a)P(c|a,b)->给定b,a与c相互\) 通过连式法则证明概率图模型表示了原始的独立假设。
- 有向图的条件独立性:D划分,如下图
 A和B之间的关系如果是第一种或者第三种则中间节点必须存在C中,如果有第二种关系,则必须在C节点之外。
A和B之间的关系如果是第一种或者第三种则中间节点必须存在C中,如果有第二种关系,则必须在C节点之外。
马尔科夫网络
- 无向图没有类似有向图的局部不同结构,在马尔科夫网络中,也可以进行D划分。直接将条件独立几何划分为三个集合,对应的就是全局马尔科夫性。对应上面的D划分就是A与B之间的路径中的节点最少有一个在C中。
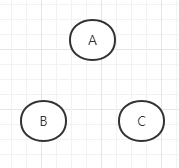
- 成对马尔科夫:a节点与b节点在给定除过a,b节点外的其他节点的情况下,a,b相互独立(a,b之间没有直接联系)
- 局部马尔科夫:当前点在给定其邻居节点的情况下,其与除过自己和邻居节点外的其他节点相互独立
- 为了引入因子分解,需要最大团,最大团指的是:图中节点的集合,集合中的节点之间相互都是连接的叫做团,如果不能再添加节点,那么叫最大团。
- 基于此,对x进行联合概率因子分解,假设K个团,Z对应所有可能取值的求和 \(P(x) = \frac{1}{Z}\prod_{i=1}^K \psi (x_{ci})\\ Z = \sum_{x\in X}\prod_{i=1}^K \psi (x_{ci})\) 其中\(\psi (x_{ci})\)为势函数,必须是正数,可以记\(\psi (x_{ci}) = exp(-E(x_{ci}))\)
- 基于最大团的分解符合条件独立性,基于\(Hammesley-Clifford\)定理可以证明。
道德图
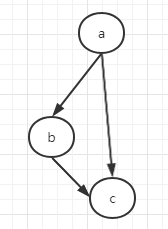
- 将有向图转化为无向图: \(第一种:p(a,b,c)=P(b)P(a|b)P(c|b)=\psi (a,b)\psi (b,c)\\ 第二种:P(a,b,c)=P(a)P(b|a)P(c|b)=\psi (a,b)\psi (b,c)\\ 第三种:P(a,b,c)=P(a)P(c)P(b|a,c)=\psi (a,b,c),于是a,c之间添加了线\)
- 总结上面的公式可以概括为:
- 将每个节点的父节点两两连接
- 将有向边替换为无向边
因子图
注:对于一个有向图,可以通过引入环的方式,可以将其转换为无向图(Tree-like graph),这个图就叫做道德图。但是我们上面的 BP 算法只对无环图有效,通过因子图可以变为无环图。
-
考了一个无向图:
 将其转化为:
将其转化为:
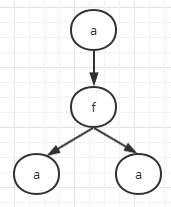
-
其中 \(f=f(a,b,c)\)。因子图不是唯一的,这是由于因式分解本身就对应一个特殊的因子图,将因式分解:\(p(x)=\prod\limits_{s}f_s(x_s)\) 可以进一步分解得到因子图。
推断
- 推断的目的在于:
- 求边缘概率
- 条件概率
- MAP方式求解参数
- 分类
- 精确推断:
- variable Elimination VE
- Belief progagation,从VE发展而来
- Junction Tree,上面两种在树结构中应用,当前方法在图结构应用
- 近似推断:
- Loop Belief progagation,针对有环图
- MCMC
- Variational Inference
- 精确推断:
变量消除VE
- 变量消除就是在求解概率分布的时候,将相关的条件概率归类先进行求和,,从而一步步消除变量,例如在马尔科夫链中: \(p(d)=\sum_{a, b, c} p(a, b, c, d)=\sum_{c} p(d | c) \sum_{b} p(c | b) \sum_{a} p(b | a) p(a)\)
- 缺点:
- 计算没有存储,计算每个节点都要从头开始计算
- 消除的最优词序是一个np-hard问题